|
I'm a PhD student at MIT, advised by Professor Navid Azizan in LIDS. I work on safe control theory and performant robot learning, with humanoid, quadruped, and drone applications. My goal is to create safe and efficient autonomous systems that can operate in complex and dynamic environments. I earned my M.S. (2025) in Mechanical Engineering from Carnegie Mellon University. At CMU, I was advised by Professor Changliu Liu and Professor John Dolan at the Robotics Institute. I was a part of the Intelligent Control Lab (ICL) and Driverless Intelligent Vehicle Lab (DRIVE Lab). Prior to CMU, I earned my B.S. (2023) from UC Berkeley with a major in Mechanical Engineering and a minor in EECS. During my time at Berkeley, I did safe reinforcement learning research under Professor Koushil Sreenath. Outside of school, I do kendo, scuba diving, and rock climbing. Email / CV / Google Scholar / Github |

|
|
In reverse chronological order:
|
|
|
|
Yifan Sun, Rui Chen, Kai S. Yun, Yikuan Fang, Sebin Jung, Feihan Li, Bowei Li, Weiye Zhao, Changliu Liu Submitted to Robotics: Science and Systems (RSS), 2025. arXiv | Website | Video To alleviate the challenge of robust safety measures in general humanoid operation, we introduce the Safe Protective and Assistive Robot Kit (SPARK), a modular toolbox that integrates state-of-the-art safe control algorithms into a generic humanoid control framework. SPARK enables users to configure safety behaviors across multiple dimensions, such as defining safety criteria and sensitivity levels, allowing for optimized trade-offs between safety and performance. |
|
Kai S. Yun, Rui Chen, Chase Dunaway, John M. Dolan, Changliu Liu Accepted to International Conference on Robotics and Automation (ICRA), 2025. arXiv | Website | Video We deploy Safety Index Adaptation (SIA) for a quadruped robot to safely navigate in varying dynamics. SIA enables real-time adaptation of safety indices to ensure provable safety. With SIA, the quadruped carries packages of varying weights and sizes while navigating through obstacles without failure. Moreover, we introduce a novel linear model for varying quadruped dynamics and a method to identify the changing dynamics. |
|
Simin Liu*, Kai S. Yun*, John M. Dolan, Changliu Liu Published in European Control Conference (ECC), 2024. IEEE | arXiv We investigate controller synthesis for dynamical systems with uncertain parameters. We designed an optimization algorithm for generating robust-adaptive safe controllers that can guarantee safety in the presence of uncertainties, without being overly conservative. Our controller performs 55% better compared to popular robust controllers. |
|
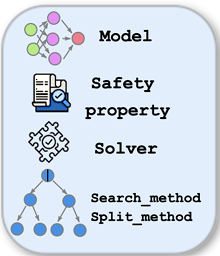
Tianhao Wei, Luca Marzari*, Kai S. Yun*, Hanjiang Hu*, Peizhi Niu*, Xusheng Luo, Changliu Liu Under review at International Conference on Computer Aided Verification (CAV), 2024. arXiv | GitHub We introduce a new comprehensive toolbox for formally verifying deep neural networks. ModelVerification.jl is a Julia package (with Python interface) that provides a wide range of state-of-the-art verification algorithms for various deep neural networks. This toolbox is designed to be user-friendly and efficient, and it is open-source. |
|
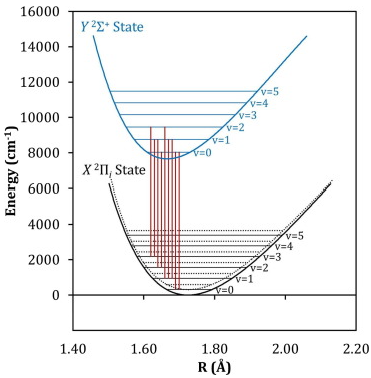
Jack C. Harms, Ethan M. Grames, SirkHoo Yun, Bushra Ahmed, Leah C. O'Brien, James J. O'Brien Journal of Molecular Spectroscopy, 2019. Journal of Molecular Spectroscopy The previous literature on the electronic spectrum of Copper-63 Oxide is extended to Copper-65 Oxide. We combine the analysis of A-X and Y-X electronic systems of Copper-65 Oxide, using the mass-independent Dunham fit with PGOPHER software to obtain molecular constants. Moreover, Copper-isotope field-shift is corrected to the electronic exictation energy required in the fit of Y-X system. |
|
|
|
Demo video In this project, we developed a teleoperation system for Unitree G1 humanoid robot with Apple Vision Pro (AVP). Using the AVP, the system tracks the human operator's hands and translates the end-effector poses into the humanoid's upper-body movements. |
|
Demo video For this project, we implemented a Linear Quadratic Regulator (LQR) controller to balance an inverted pendulum on a quadrotor. I built the quadrotor, named "Danaus-12", with PX4-Autopilot firmware. A carbon fiber tube is used as the pendulum and it is not mechanically attached to the quadrotor. Instead, it simply rests on the quadrotor and the LQR controller is used to balance the pendulum. The quadrotor is controlled with an offboard computer and I used a Vicon motion capture system to track the positions of the quadrotor and pendulum. This work is based on "A flying inverted pendulum", by Markus Hehn and Raffaello D'Andrea from ETH. |
|
|

Unitree G1 |

Unitree Go2 |

PX4 Quadrotor |
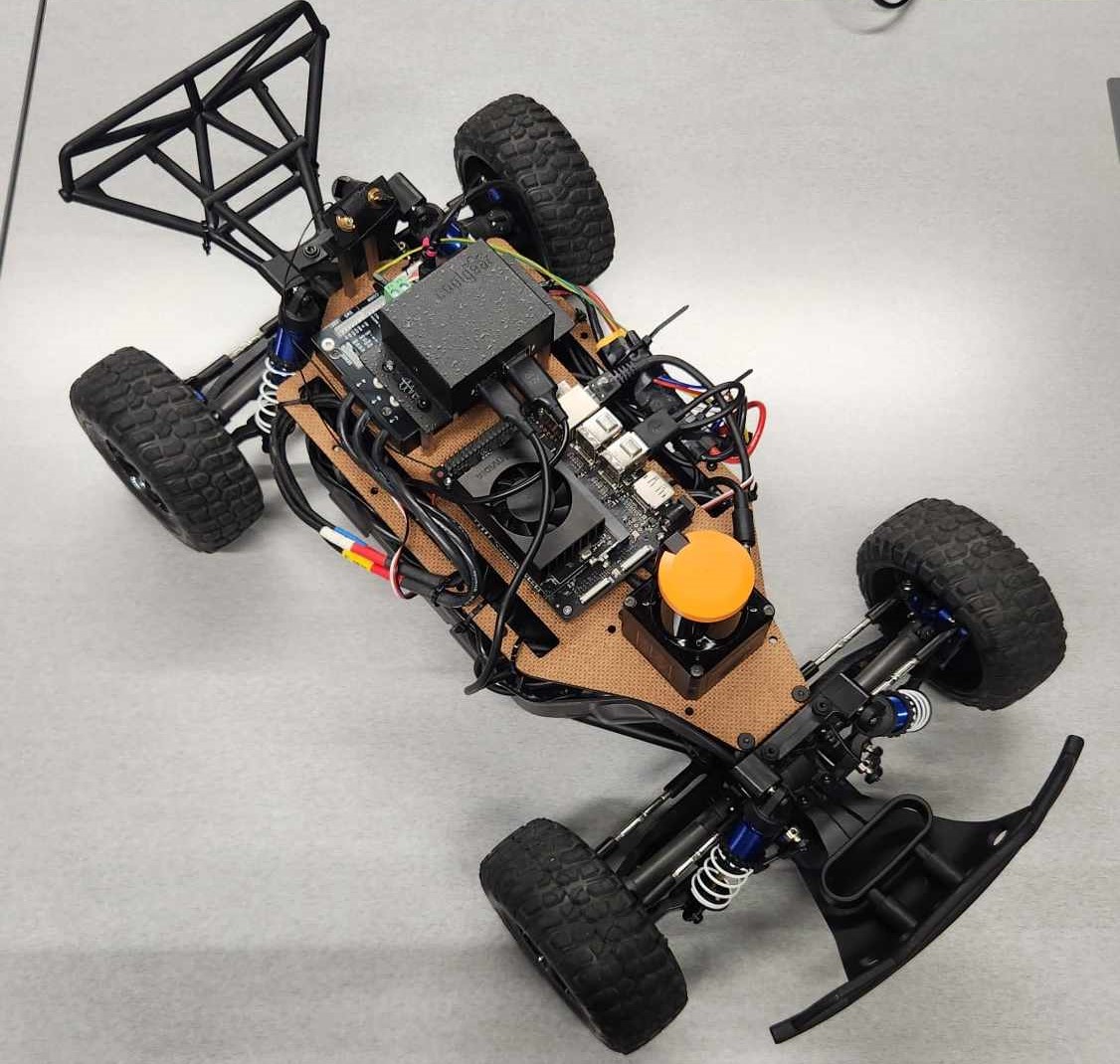
F1Tenth |
|
|
|
Tesla, Inc., Vehicle Dynamics Team
Vehicle Dynamics / Software Engineering Intern • May 2022 to August 2022 |
|
NeuroCore.ai., Reinforcement Learning Team
Reinforcement Learning Research Intern • October 2020 to July 2021 |
|
|